For … Next Loop | Do … Loop | While … Wend loop
This post will guide you how to use loops statements in MS excel VBA. There are three most useful Loops statements as bellows: For …Next loop, Do … Loop and While …Wend loop.
You can use Loop statement to perform the same statement multiple times in MS VBA program.
If we want to add up the numbers 1 to 10, we can easily to get the results. But if we need to add up the numbers 1 to a 100. You wouldn’t have to type them all out to do addition operation, now we can use the loop.
Table of Contents
For … Next Loop example
Sample1: add up the numbers 1 to 100
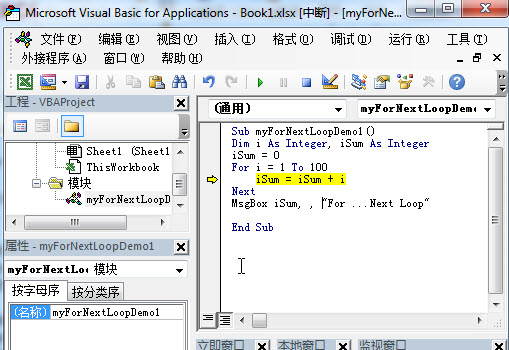
1# open visual Basic Editor, then insert a module and name as: myForNextLoopDemo1
2# enter into the below VBA codes in code window.
Sub myForNextLoopDemo1()
Dim i As Integer, iSum As Integer
iSum = 0
For i = 1 To 100
iSum = iSum + i
Next
MsgBox iSum, , "For ...Next Loop"
End Sub
3# back to workbook and run the above macro.
Do … Loop example
Sample2: add up the numbers 1 to 100 using Do Loop
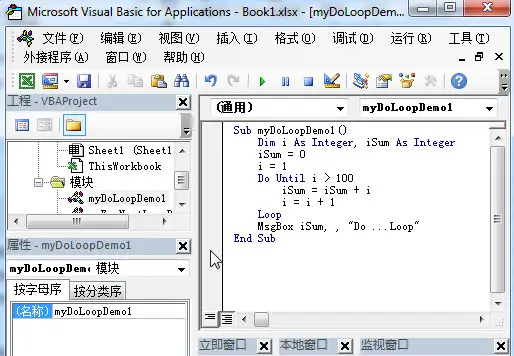
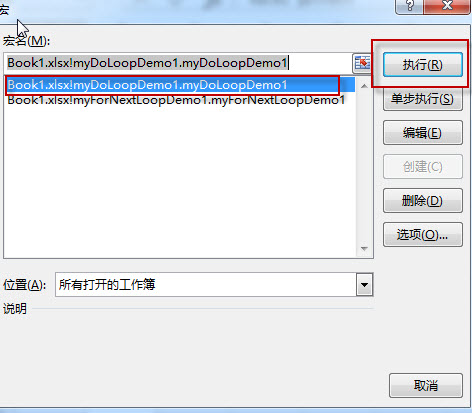
1# open visual Basic Editor, then insert a module and name as: myDoLoopDemo1
2# enter into the below VBA codes in code window.
Sub myDoLoopDemo1() Dim i As Integer, iSum As Integer iSum = 0 i = 1 Do Until i > 100 iSum = iSum + i i = i + 1 Loop MsgBox iSum, , "Do ...Loop" End Sub
3# back to workbook and run the above macro.
While …Wend loop Example
Sample3: add up the numbers 1 to 100 using While … Wend Loop
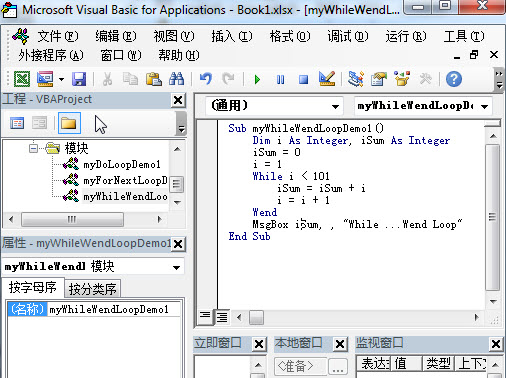
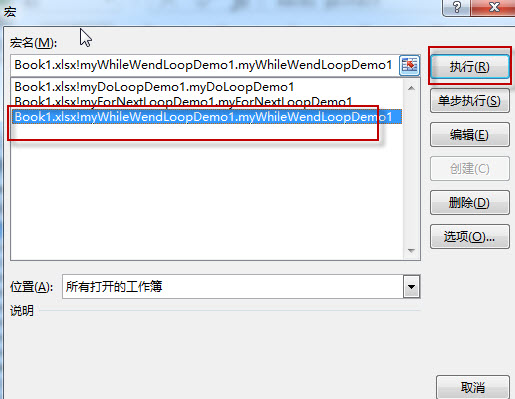
1# open visual Basic Editor, then insert a module and name as: myWhileWendLoopDemo1
2# enter into the below VBA codes in code window.
Sub myWhileWendLoopDemo1()
Dim i As Integer, iSum As Integer
iSum = 0
i = 1
While i < 101
iSum = iSum + i
i = i + 1
Wend
MsgBox iSum, , "While ...Wend Loop"
End Sub
3# back to workbook and run the above macro.
Leave a Reply
You must be logged in to post a comment.